Planetary In-Situ Instruments
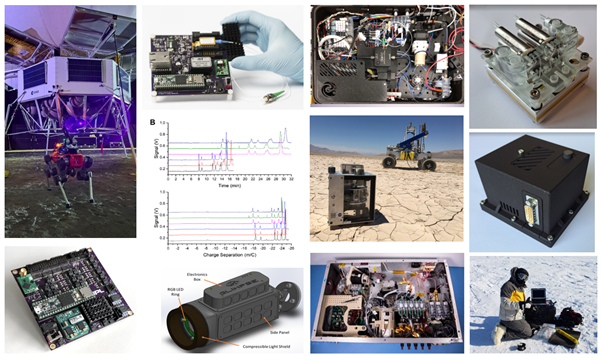
Image Credit: NASA/JPL-Caltech/UZH/HSLU/ACS
Florian Kehl is a senior scientist and teaching assistant at the University of Zurich’s Space Hub, a lecturer at HSLU T&A’s Space Biology Group, and a NASA-JPL affiliate within the Chemical Analysis and Life Detection Group. His research focuses on in-situ instrumentation and liquid-phase sensor systems for astrobiology, space biology, and in-situ resource utilization (ISRU). Before returning to Switzerland, he spent five years at NASA’s Jet Propulsion Laboratory (JPL), working on the development of life detection instruments for Mars and Ocean Worlds. He was the lead technologist for SCWE (a subcritical water extractor) and the microfluidic CE-LIF instrument on the JPL Ocean Worlds Life Surveyor (OWLS) suite. As a payload designer, he participated in numerous simulated missions in extreme environments such as the Atacama Desert (Chile) or the Arctic. Kehl is co-leading the project GLIMPSE (“Geological lunar in-situ mapper and prospector for surface exploration), funded by the European Space Agency ESA, to search for resources on the Moon by an autonomous, legged robot. He also acts as an advisor for the ETH ARIS rocketry team and supports the students in developing a rotating, “artificial gravity” CubeSat platform which shall be launched to space in 2024.
Watch the following video and listen to Florian Kehl explaining his work on the Swiss robot dog GLIMPSE, developed to prospect resources on the Moon:
Contact
|
|
Dr. Florian Kehl Space Instruments Group Department of Astrophysics University of Zurich, Y11-G-16 Winterthurerstrasse 190 8057 Zurich, Switzerland and Department of Earth and Planetary Sciences ETH Zürich Space Science and Technology NO G 48 Sonneggstrasse 5 8092 Zurich, Switzerland florian.kehl@uzh.ch Webpage LinkedIn Google Scholar |

Media coverage
- Blick: Eidgenössischer Roboterhund Auf dem Weg zum Mond
- Schweizer Familie: «Ist da jemand?»
- 20 Minuten: «Ich suche nach Spuren von Leben im All»
- Corriere Del Ticino: «Dentro i laboratori della NASA con uno scienziato svizzero»
- Migros Magazin: «Von St. Gallen zu den Sternen»
- NASA News: «A Life-Detection Mini-lab - Atacama Rover Astrobiology Drilling Studies»
- Tagblatt: «E.T. werden wir nicht finden»
- Werdenberger & Obertoggenburger: «Suche nach Lebensspuren»
- RSI News: «Vita negli oceani alieni»
- Südostschweiz: «Seine Messinstrumente sollen bald zum Mars fliegen»
- NASA News: «Detecting Life in the Ultra-dry Atacama Desert»
- Schweizer Illustrierte: «Näher bei den Stars»
- Radio Top, Broadcast Series